山东威力重工4000吨新能源汽车LC绝缘垫片油压机PLC与运动控制器介绍
文章出处:www.yyj58.com
人气:111发表时间:2019-03-21 10:05
一些山东威力重工4000吨新能源汽车LC绝缘垫片油压机闭环运动控制应用明显需要运动控制器,而其他人可以通过使用PLC来关闭控制回路。当然,做出决定往往属于灰色地带。
当您可以使用PLC时,为什么要花钱购买电动液压运动控制器?答案并不简单。一般来说,它是数量,难易程度,可用时间,生产率,所需精度和经济性的函数。决定可能非常模糊。根据经验,我们知道哪些类型的应用程序可以使用PLC完成,哪些不能。
对于大多数山东威力重工4000吨新能源汽车LC绝缘垫片油压机控制系统设计者来说,通常首先考虑成本。简单的方法是购买一台带有每个轴的模拟输入和输出的PLC,一些数字I / O,然后开始编程。您通常从简单的比例控制开始; 甚至不需要PID块。这就是世界上大部分地区进行液压伺服控制的方式,而且教授液压系统的人不再受教育。
模拟反馈必须缩放到位置单位。但是,我很惊讶地看到有多少人在PLC论坛上询问如何将模拟输入扩展为毫米或英寸。如果有人问这个问题,他们就不应该编程。缩放输入后,从命令位置减去实际位置非常简单,将差值乘以比例增益,并将其写入阀门的模拟输出。这很容易。
设置用于模拟控制的PLC
当气缸的指令和实际位置相距很远时,山东威力重工4000吨新能源汽车LC绝缘垫片油压机PLC控制发生挑战,因为阀门的输出可能非常大。结果是液压缸全速前进到指令位置。在命令位置发生的事情取决于增益和负载。有时气缸将平稳地减速到指令位置,但是大负载可能会导致过冲,并伴有衰减振荡。
已经提出了针对该问题的不同解决方案。一个简单的方法是将输出限制在100%以下的某个值。更好的解决方案是制作原始目标生成器并将目标位置增加到命令位置。然后,不是将命令位置与实际位置进行比较,而是将实际位置与下一个目标位置进行比较。目标位置从当前实际位置开始,并以所需速率递增,直到达到指令位置。这可以避免长时间移动时的初始震动和冲击。该解决方案实施起来也相对简单。
例如,如果两个汽缸都遵循相同的目标位置,则同步两个汽缸的位置相对容易。如果两个气缸上的负载相当,则目标位置后面的跟随误差应相等,因此两个气缸的实际位置应大致相同。
那么仅比例控制的以下错误是什么?
以下错误的公式为:
E f = v /(K∙K p)
哪里:
E f 是以下错误,mm,
v是速度,单位为mm / s,
K是开环增益,单位为(mm / s)/%,和
K p是比例增益,单位为%/ mm。
单位很重要,应该是一致的。百分比表示控制输出的百分比。控制输出的百分比可以是±10 V,±20 mA或控制输出单位的百分比。当使用山东威力重工4000吨新能源汽车LC绝缘垫片油压机PLC电缸时,以下错误通常并不重要,只需要合理地靠近指令位置。对于需要限制跟随误差的应用,将需要上述等式。用户确定速度以满足应用要求。
计算开环增益需要使用VCCM方程,该方程计算100%控制输出时的最大稳态速度。本专栏已多次讨论该等式。 点击此处获取详细说明。
计算比例增益更加困难。您可以使用试错法并确定看似有效的值。如果比例增益太低,气缸将响应缓慢。如果比例增益太高,执行器将倾向于振荡。但是,可以计算出最佳比例增益:
ķ p =(2∙ζ∙ω Ñ ∙(9 - 8∙ζ 2)/(27∙ ķ )
哪里:
K p是比例增益,以%control / mm为误差,
ζ是阻尼因子(如果未知则假设为0.3333),
ω是固有频率,以弧度/秒为单位
K是开环增益。
您不会在教科书中找到比例增益公式的推导。它可能会在未来的“运动控制”部分中介绍。但是,山东威力重工4000吨新能源汽车LC绝缘垫片油压机液压系统设计人员实际上可以控制最佳比例增益,因为它们可以控制阻尼系数,固有频率和开环增益。通常,使用油的体积模量,汽缸面积,压缩下的油的体积和质量来计算固有频率。由于以下误差取决于开环增益和比例增益,因此液压设计人员可控制以下误差。
关于仅比例控制的其他问题
所以现在系统已经调整好并准备好进行短暂的移动,它似乎可行。尝试稍长的移动,并且两个移动看起来花费大约相同的时间。其原因是随着误差减小,控制输出减小,因此速度呈指数下降。实际位置需要大约五个时间常数才能将误差减小到原始误差的1%以下。
时间常数是受控对象将错误减少约63%所需的时间。因此,如果误差立即增加到10毫米,时间常数为1秒,则1秒后误差将减小到3.68毫米。2秒后 误差将减少到1.35毫米。经过五个时间常数(5秒)后,误差将减小到0.067 mm,小于原始误差10 mm的1%。时间常数决定系统响应干扰所需的时间。
那么问题就是,如何仅使用比例增益来计算液压缸的时间常数?这个公式不太难:
τ是最佳时间常数。
τ = 3 /(2∙ζ∙ ω Ñ)
如果阻尼系数为0.33333且固有频率为10 Hz,则时间常数为:
τ = 3 /(2∙0.333∙2∙ π ∙10)= 0.072秒。
因为需要五个时间常数才能将误差降低到1%,所以移动需要0.358秒。
再次注意,最佳时间常数完全由机械(液压系统)设计者决定。如果五个时间常数的时间太长,山东威力重工4000吨新能源汽车LC绝缘垫片油压机液压系统设计者需要通过增加摩擦来增加固有频率或阻尼系数。增加摩擦会浪费能量。增加固有频率需要增加圆柱直径。这样做还需要增加阀门,蓄能器和泵的尺寸,从而增加了部件成本。
使用PLC实现简单的比例控制液压系统很简单,但山东威力重工4000吨新能源汽车LC绝缘垫片油压机PLC编程器无法控制许多重要参数。这种限制与PLC程序员的能力无关,而是与液压和机械设计有关。不幸的是,PLC程序员通常会在最后一刻访问液压系统,并且有望“将其修复为软件”,简单地说,这不会发生。系统行为已经根据设计和制造决策“融入”。
使用先进的液压伺服控制系统可显着提高机器性能。收购的初始成本较高,但却被性能提升所抵消。该机器也更易于维护,并且不需要频繁维护。
以下是使用仅比例控制的三种简单移动模拟。它们基于用于模拟伺服液压缸和负载运动的标准线性化模型。
H(S)=(ķ∙ω 2 Ñ)/ [S∙(S 2 + 2∙ζ∙ω Ñ ∙S +ω 2 N) ]
K,开环增益,假设为10(mm / s)/%控制输出,
s,拉普拉斯算子,是一个频率,以弧度/秒为单位。
ζ是阻尼因子,假设为0.33333。它是无量纲的,
ω Ñ是固有频率,在每秒弧度。在这种情况下,固有频率为10 Hz。
这些模拟旨在提出一些问题,但我会告诉你这个:如何改善响应时间?这个问题将在未来的“山东威力重工4000吨新能源汽车LC绝缘垫片油压机运动控制”版本中得到解答。
当您可以使用PLC时,为什么要花钱购买电动液压运动控制器?答案并不简单。一般来说,它是数量,难易程度,可用时间,生产率,所需精度和经济性的函数。决定可能非常模糊。根据经验,我们知道哪些类型的应用程序可以使用PLC完成,哪些不能。
对于大多数山东威力重工4000吨新能源汽车LC绝缘垫片油压机控制系统设计者来说,通常首先考虑成本。简单的方法是购买一台带有每个轴的模拟输入和输出的PLC,一些数字I / O,然后开始编程。您通常从简单的比例控制开始; 甚至不需要PID块。这就是世界上大部分地区进行液压伺服控制的方式,而且教授液压系统的人不再受教育。
模拟反馈必须缩放到位置单位。但是,我很惊讶地看到有多少人在PLC论坛上询问如何将模拟输入扩展为毫米或英寸。如果有人问这个问题,他们就不应该编程。缩放输入后,从命令位置减去实际位置非常简单,将差值乘以比例增益,并将其写入阀门的模拟输出。这很容易。
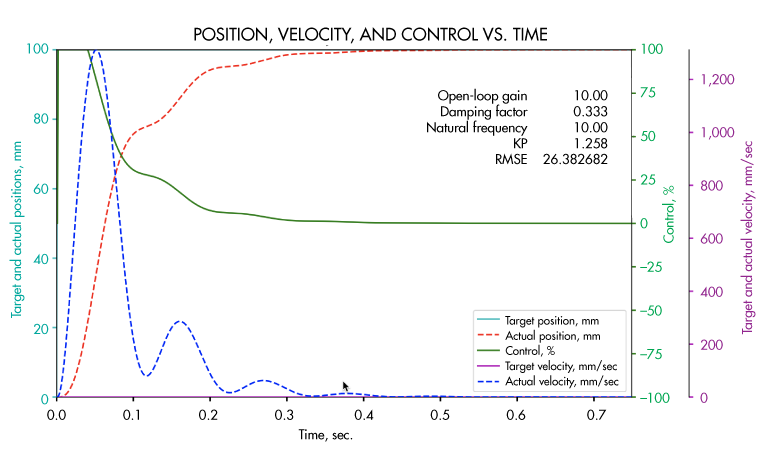
1.此模拟显示当命令位置立即改变100 mm时会发生什么。控制输出饱和度为100%,执行器以急动加速。实际位置仍缓慢接近100 mm的目的地。
设置用于模拟控制的PLC
当气缸的指令和实际位置相距很远时,山东威力重工4000吨新能源汽车LC绝缘垫片油压机PLC控制发生挑战,因为阀门的输出可能非常大。结果是液压缸全速前进到指令位置。在命令位置发生的事情取决于增益和负载。有时气缸将平稳地减速到指令位置,但是大负载可能会导致过冲,并伴有衰减振荡。
已经提出了针对该问题的不同解决方案。一个简单的方法是将输出限制在100%以下的某个值。更好的解决方案是制作原始目标生成器并将目标位置增加到命令位置。然后,不是将命令位置与实际位置进行比较,而是将实际位置与下一个目标位置进行比较。目标位置从当前实际位置开始,并以所需速率递增,直到达到指令位置。这可以避免长时间移动时的初始震动和冲击。该解决方案实施起来也相对简单。
例如,如果两个汽缸都遵循相同的目标位置,则同步两个汽缸的位置相对容易。如果两个气缸上的负载相当,则目标位置后面的跟随误差应相等,因此两个气缸的实际位置应大致相同。
那么仅比例控制的以下错误是什么?
以下错误的公式为:
E f = v /(K∙K p)
哪里:
E f 是以下错误,mm,
v是速度,单位为mm / s,
K是开环增益,单位为(mm / s)/%,和
K p是比例增益,单位为%/ mm。
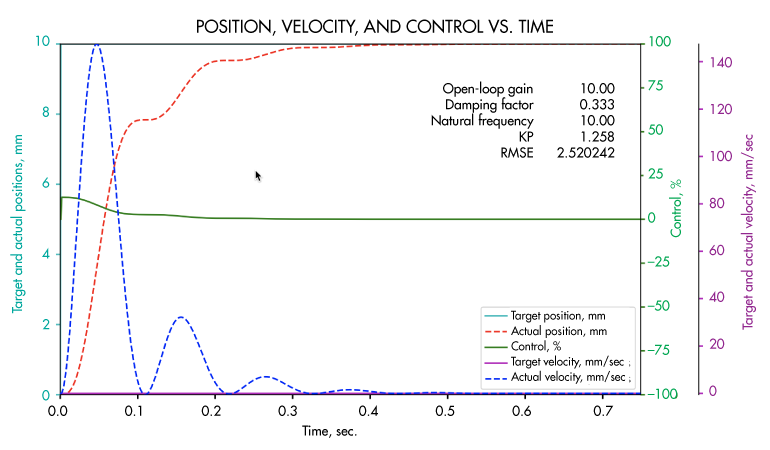
2.该图显示了与上述相同的情况,但命令位置仅改变了10 mm。请注意,它需要大约相同的时间。这是因为移动总是需要五个时间常数。五个时间常数需要0.358秒。即使是1毫米的移动也需要0.358秒。在目的地的1%范围内。
单位很重要,应该是一致的。百分比表示控制输出的百分比。控制输出的百分比可以是±10 V,±20 mA或控制输出单位的百分比。当使用山东威力重工4000吨新能源汽车LC绝缘垫片油压机PLC电缸时,以下错误通常并不重要,只需要合理地靠近指令位置。对于需要限制跟随误差的应用,将需要上述等式。用户确定速度以满足应用要求。
计算开环增益需要使用VCCM方程,该方程计算100%控制输出时的最大稳态速度。本专栏已多次讨论该等式。 点击此处获取详细说明。
计算比例增益更加困难。您可以使用试错法并确定看似有效的值。如果比例增益太低,气缸将响应缓慢。如果比例增益太高,执行器将倾向于振荡。但是,可以计算出最佳比例增益:
ķ p =(2∙ζ∙ω Ñ ∙(9 - 8∙ζ 2)/(27∙ ķ )
哪里:
K p是比例增益,以%control / mm为误差,
ζ是阻尼因子(如果未知则假设为0.3333),
ω是固有频率,以弧度/秒为单位
K是开环增益。
您不会在教科书中找到比例增益公式的推导。它可能会在未来的“运动控制”部分中介绍。但是,山东威力重工4000吨新能源汽车LC绝缘垫片油压机液压系统设计人员实际上可以控制最佳比例增益,因为它们可以控制阻尼系数,固有频率和开环增益。通常,使用油的体积模量,汽缸面积,压缩下的油的体积和质量来计算固有频率。由于以下误差取决于开环增益和比例增益,因此液压设计人员可控制以下误差。
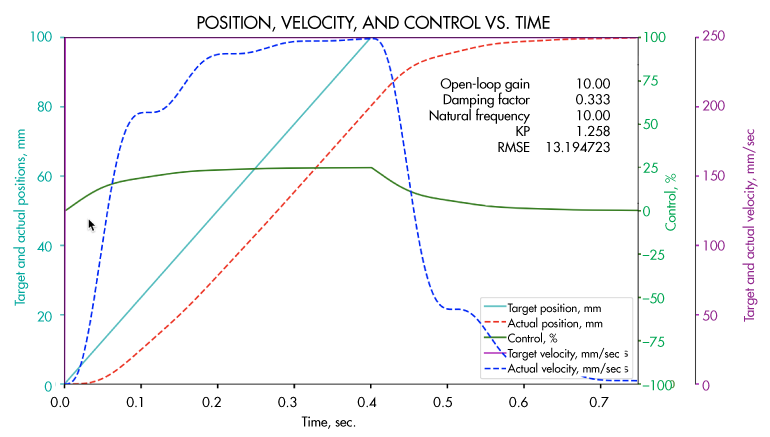
3.此模拟显示了添加以恒定速度移动的简单目标生成器的好处。请注意,控制输出不会饱和,实际位置移动得更加平滑。速度接近250毫米/秒。正如所料。(100毫米/0.4秒)。加速度要小得多。请注意,第一次和第三次模拟之间的速度标度差异很大。
关于仅比例控制的其他问题
所以现在系统已经调整好并准备好进行短暂的移动,它似乎可行。尝试稍长的移动,并且两个移动看起来花费大约相同的时间。其原因是随着误差减小,控制输出减小,因此速度呈指数下降。实际位置需要大约五个时间常数才能将误差减小到原始误差的1%以下。
时间常数是受控对象将错误减少约63%所需的时间。因此,如果误差立即增加到10毫米,时间常数为1秒,则1秒后误差将减小到3.68毫米。2秒后 误差将减少到1.35毫米。经过五个时间常数(5秒)后,误差将减小到0.067 mm,小于原始误差10 mm的1%。时间常数决定系统响应干扰所需的时间。
那么问题就是,如何仅使用比例增益来计算液压缸的时间常数?这个公式不太难:
τ是最佳时间常数。
τ = 3 /(2∙ζ∙ ω Ñ)
如果阻尼系数为0.33333且固有频率为10 Hz,则时间常数为:
τ = 3 /(2∙0.333∙2∙ π ∙10)= 0.072秒。
因为需要五个时间常数才能将误差降低到1%,所以移动需要0.358秒。
再次注意,最佳时间常数完全由机械(液压系统)设计者决定。如果五个时间常数的时间太长,山东威力重工4000吨新能源汽车LC绝缘垫片油压机液压系统设计者需要通过增加摩擦来增加固有频率或阻尼系数。增加摩擦会浪费能量。增加固有频率需要增加圆柱直径。这样做还需要增加阀门,蓄能器和泵的尺寸,从而增加了部件成本。
使用PLC实现简单的比例控制液压系统很简单,但山东威力重工4000吨新能源汽车LC绝缘垫片油压机PLC编程器无法控制许多重要参数。这种限制与PLC程序员的能力无关,而是与液压和机械设计有关。不幸的是,PLC程序员通常会在最后一刻访问液压系统,并且有望“将其修复为软件”,简单地说,这不会发生。系统行为已经根据设计和制造决策“融入”。
使用先进的液压伺服控制系统可显着提高机器性能。收购的初始成本较高,但却被性能提升所抵消。该机器也更易于维护,并且不需要频繁维护。
以下是使用仅比例控制的三种简单移动模拟。它们基于用于模拟伺服液压缸和负载运动的标准线性化模型。
H(S)=(ķ∙ω 2 Ñ)/ [S∙(S 2 + 2∙ζ∙ω Ñ ∙S +ω 2 N) ]
K,开环增益,假设为10(mm / s)/%控制输出,
s,拉普拉斯算子,是一个频率,以弧度/秒为单位。
ζ是阻尼因子,假设为0.33333。它是无量纲的,
ω Ñ是固有频率,在每秒弧度。在这种情况下,固有频率为10 Hz。
这些模拟旨在提出一些问题,但我会告诉你这个:如何改善响应时间?这个问题将在未来的“山东威力重工4000吨新能源汽车LC绝缘垫片油压机运动控制”版本中得到解答。
推荐产品
同类文章排行
- 生产牛羊舔砖需要什么设备
- 塑料花盆热压成型需要多少吨油压机
- 万向节轴承座热锻成型油压机
- 陶瓷砖粉末成型油压机
- 石墨匣钵粉末油压机
- 加工陶瓷粉末制品选择陶瓷粉末成型油压机
- 锚杆托盘冲压成型油压机
- 塑料花盆热压成型油压机
- 镁碳砖成型油压机
- 油压机是怎么加工陶瓷粉末成型的
最新资讯文章
- 生产陶瓷粉末制品需要什么设备
- 生产牛羊舔砖需要什么设备
- 汽车门内衬拉伸成型需要多少吨油压机
- 氧化铝粉末成型油压机
- 塑料花盆热压成型需要多少吨油压机
- 生产炭素坩埚需要什么设备
- 石墨匣钵粉末成型需要多少吨油压机
- 万向节轴承座热锻成型油压机
- 汽车门内衬拉伸油压机
- 活性炭压制成型油压机